I2C通信详解
在使用单片机的过程中,I2C 通信可以说是最被广泛使用和采纳的协议之一,采用 I2C 协议可以占用更少的资源,链接多台设备,因此它和 SPI 一样,在数字传感器中备受偏爱。
I²C(Inter-Integrated Circuit)字面上的意思是集成电路之间,它其实是 I²C Bus 简称,所以中文应该叫集成电路总线,它是一种串行通信总线,使用多主从架构,由飞利浦公司在1980年代为了让主板、嵌入式系统或手机用以连接低速周边设备而发展。I²C 的正确读法为“I平方C”(”I-squared-C”),而“I二C”(”I-two-C”)则是另一种错误但被广泛使用的读法。自2006年11月1日起,使用I²C协议已经不需要支付专利费,但制造商仍然需要付费以获取I²C从属设备地址。
I2C 主要用于电压、温度监控,EEPROM数据的读写,光模块的管理等。该总线只有两根线,SCL 和 SDA,SCL 即 Serial Clock,串行参考时钟,SDA 即 Serial Data,串行数据。
原理
IO口
注意使用其他通讯协议时,你可能不需要特别注意 IO 的模式,但如果你使用的是模拟 I2C 的话,则最好关注下 IO 口模式设置。在 I2C 总线中有 2 个口线,SDA 和 SCL。这两个口线对为 OC 输出。
OC就是开漏输出(Open Collector)的简称,有时候也叫OD输出(Open-Drain),OD是对mos管而言,OC是对双极型管而言,在用法上没啥区别。相对于OC输出,另一种输出叫推挽输出(Push-Pull),一般的MCU管脚输出可以设置这两种模式。这里分别介绍下这两种输出的不同点。
- 推挽输出 : 可以输出高、低电平连接数字器件,推挽结构一般是指两个三极管分别受两互补信号的控制,总是在一个三极管导通的时候另一个截止.
- 开漏输出 : 输出端相当于三极管的集电极未接任何电平, 要得到高电平状态需要上拉电阻才行,适合于做电流型的驱动,其吸收电流的能力相对强(一般20ma以内)。
对于MCU的开发者来讲,简单的这样理解就可以了。如果管脚设置成推挽输出模式,输出高时,IO口相当于VCC, 输出低时IO口相当于接地。如果管脚设置成开漏输出模式,输出高时,IO口的电平会和与其相连的口线进行与操作,如果都为高,才会被上拉拉成高电平,输出为低时,也相当于接地。
在网上我们看到很多的例程代码都是直接设置IO口的高低电平,这样做其实是不太合理的。因为我们只满足了 I2C 总线在自己这端的时序要求。而没有考虑到连接在总线上的其他器件。如果总线上其他器件的电平和MCU输出的电平一致,这样做是没问题的,如果两边的电平不一致时,这样做就有一定风险造成IO的损坏。当你输出高时,相当于IO口连接到VCC,如果对方这是恰好输出的是低电平,那就相当于短路了。因为 I2C 总线要实现线与的功能,所以 SDA 和 SCL 口线都必须设置为开漏输出模式,这种方式也是最安全的模式。我们使用 MCU 的硬件 I2C 接口时,口线会被自动设置成开漏。但有时候我们会使用 IO 口来模拟 I2C 总线,这个时候我们如何设置口线呢?
因为 I2C 的总线是开漏输出的,总线上接上上拉电阻后,SCL 和 SDA 就变成了高电平,这个时候挂接在总线上的任意一个 I2C 主机口可以把 SDA 拉低,即产生了一个 START 信号,挂接在总线上的其他 I2C 主机检测到这个信号后就不能去操作 I2C 总线了,否则会发生冲突。直到检测到一个 STOP 信号为止。STOP 的信号是在 SCL 口线为高时,SDA 产生一个上升沿。STOP 信号之后,I2C总线恢复到初始状态。
这里要分两种情况,如果MCU的口线支持开漏输出模式,则可以直接把 SDA 和 SCL 设置成开漏输出。例如 Silicon 的 C8051 系列 MCU,它的口线就支持开漏和推挽输出。如果 MCU 不支持开漏输出,例如 MSP430。当然如果软件做的合理,是可以避免这样的事情的,但总线上的很多器件都不是由你能控制的,如何设计出更合理的软件来避免这样的问题发生呢?对于不支持开漏输出MCU,我们最合理的做法是,当设置口线电平为高时,我们把口线设置成输入状态,然后利用口线上的上拉电阻来把口线拉高。这样即使是两边电平不一致时,也不会造成IO口的损坏。
速度
常见的I²C总线依传输速率的不同而有不同的模式:标准模式(100 Kbit/s)、低速模式(10 Kbit/s),但时钟频率可被允许下降至零,这代表可以暂停通信。而新一代的I²C总线可以和更多的节点(支持10比特长度的地址空间)以更快的速率通信:快速模式(400 Kbit/s)、高速模式(3.4 Mbit/s)。
连线
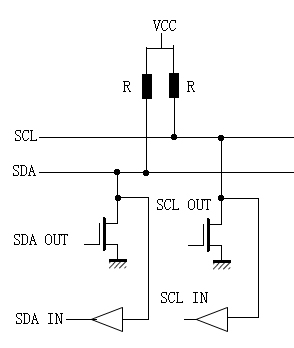
如上图所示,I2C 是 OC 或 OD 输出结构,使用时必须在芯片外部进行上拉,上拉电阻R的取值根据 I2C 总线上所挂器件数量及 I2C 总线的速率有关,一般是标准模式下 R 选择 10kohm,快速模式下 R 选取 1kohm,I2C 总线上挂的 I2C 器件越多,就要求 I2C 的驱动能力越强,R 的取值就要越小,实际设计中,一般是先选取 4.7kohm 上拉电阻,然后在调试的时候根据实测的 I2C 波形再调整 R 的值。
I²C 只有两根通讯线:数据线 SDA 和时钟 SCL,可发送和接收数据。I2C 总线在传送数据过程中共有三种类型信号, 它们分别是:
- 开始信号: SCL 为高电平时, SDA 由高电平向低电平跳变,开始传送数据。
- 结束信号: SCL 为高电平时, SDA 由低电平向高电平跳变,结束传送数据。
- 应答信号:接收数据的 IC 在接收到 8bit 数据后,向发送数据的 IC 发出特定的低电平脉冲,表示已收到数据。 CPU 向受控单元发出一个信号后,等待受控单元发出一个应答信号, CPU 接收到应答信号后,根据实际情况作出是否继续传递信号的判断。若未收到应答信号,由判断为受控单元出现故障。
具体时序如下图所示:
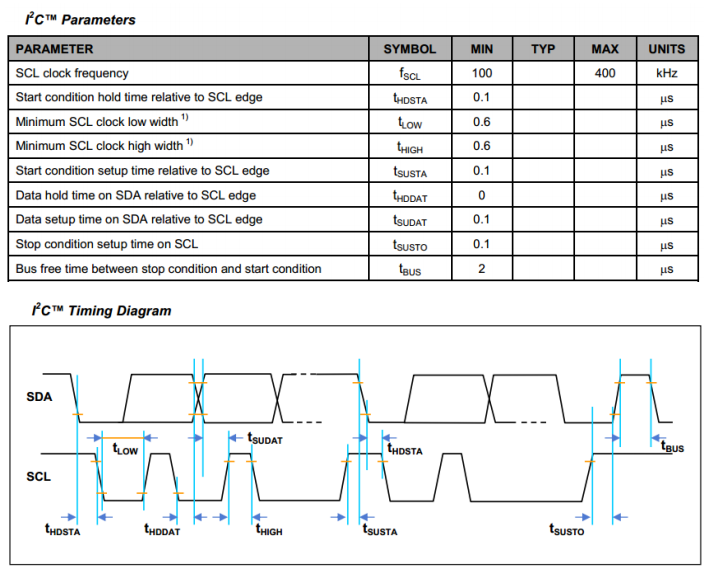
I2C总线的主要时序参数有:开始建立时间 t(SUSTA),开始保持时间 t(HDSTA),数据建立时间 t(SUDAT),数据保持时间 t(SUDAT) ,结束建立时间 t(SUSTO) 。
- 开始建立时间:SCL 上升至幅度的90%与SDA下降至幅度的90%之间的时间间隔;
- 开始保持时间:SDA下降至幅度的10%与SCL下降至幅度的10%之间的时间间隔;
- 数据建立时间:SDA上升至幅度的90%或SDA下降至幅度的10%与SCL上升至幅度的10%之间的时间间隔;
- 数据保持时间:SCL下降至幅度的10%与SDA上升至幅度的10%或SDA下降至幅度的90%之间的时间间隔;
结束建立时间:SCL上升至幅度的90%与SDA上升至幅度的90%之间的时间间隔;
数据接收方收到传输的一个字节数据后,需要给出响应,此时处在第九个时钟,发送端释放SDA线控制权,将SDA电平拉高,由接收方控制。若希望继续,则给出“应答(ACK)”信号,即SDA为低电平;反之给出“非应答(NACK)”信号,即SDA为高电平。I2C总线传输的特点:I2C总线按字节传输,即每次传输8bits二进制数据,传输完毕后等待接收端的应答信号ACK,收到应答信号后再传输下一字节。等不到ACK信号后,传输终止。空闲情况下,SCL和SDA都处于高电平状态。
每个字节后会跟随一个ACK信号。ACK bit使得接收者通知发送者已经成功接收数据并准备接收下一个数据。所有的时钟脉冲包括ACK信号对应的时钟脉冲都是由master产生的。
ACK信号:发送者在ACK时钟脉冲期间释放SDA线,接收者可以将SDA拉低并在时钟信号为高时保持低电平。
NACK信号:当在第9个时钟脉冲的时候SDA线保持高电平,就被定义为NACK信号。Master要么产生STOP条件来放弃这次传输,或者重复START条件来发起一个新的开始。
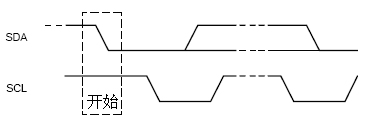
- 判断一次传输的开始:如上图所示,I2C总线传输开始的标志是:SCL信号处于高电平期间,SDA信号出现一个由高电平向低电平的跳变。
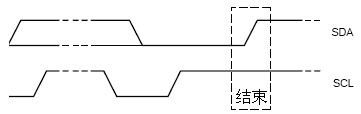
- 判断一次传输的结束:如上图所示,I2C总线传输结束的标志是:SCL信号处于高电平期间,SDA信号出现一个由低电平向高电平的跳变。跟开始标识正好相反。

- 有效数据:在SCL处于高电平期间,SDA保持状态稳定的数据才是有效数据,只有在SCL处于低电平状态时,SDA才允许状态切换。前面已经讲过了,SCL高电平期间,SDA状态发生改变,是传输开始/.结束的标志。
读写
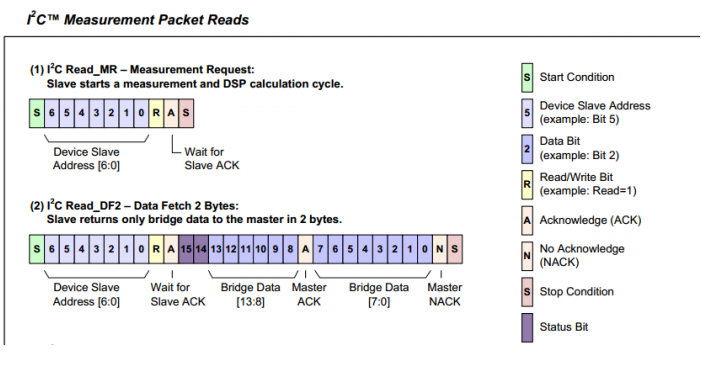
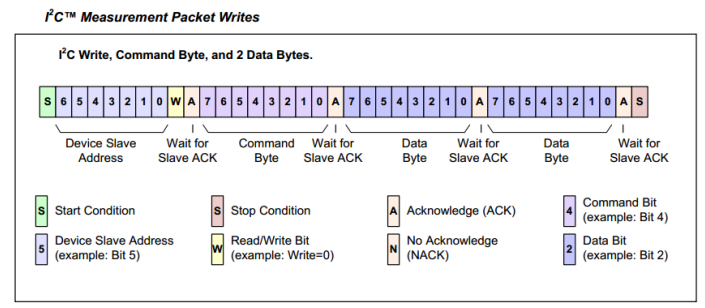
如上图所示,I2C开始传输时,第一个字节的前7bit是地址信息(7位地址器件),第8bit是操作标识,为“0”时表示写操作,为“1”时表示读操作,第9个时钟周期是应答信号ACK,低有效,高电平表示无应答,传输终止。在上图中还可以看出,正常情况下,写操作是I2C主设备方发起终止操作的,而读操作时,I2C主控制器在接收完最后一个数据后,不对从设备进行应答,传输终止。
I2C数据总线SDA是在时钟为高时有效,在时钟SCL为高期间,SDA如果发生了电平变化就会终止或重启I2C中线,所以我们在数据传输过程中,要在SCL为低的时候去更改SDA的电平。
总线信号时序
再次总结下总线的各种时序状态:
- 总线空闲状态:SDA 和 SCL 两条信号线都处于高电平,即总线上所有的器件都释放总线,两条信号线各自的上拉电阻把电平拉高;
- 启动信号 START:信号 SCL 保持高电平,数据信号SDA的电平被拉低(即负跳变)。启动信号必须是跳变信号,而且在建立该信号前必修保证总线处于空闲状态;
- 停止信号 STOP:时钟信号SCL保持高电平,数据线被释放,使得SDA返回高电平(即正跳变),停止信号也必须是跳变信号。
- 数据传送:SCL 线呈现高电平期间,SDA 线上的电平必须保持稳定,低电平表示 0 (此时的线电压为地电压),高电平表示1(此时的电压由元器件的VDD决定)。只有在 SCL 线为低电平期间,SDA 上的电平允许变化。
- 应答信号 ACK:I2C 总线的数据都是以字节( 8 位)的方式传送的,发送器件每发送一个字节之后,在时钟的第9个脉冲期间释放数据总线,由接收器发送一个ACK(把数据总线的电平拉低)来表示数据成功接收。
- 无应答信号 NACK:在时钟的第 9 个脉冲期间发送器释放数据总线,接收器不拉低数据总线表示一个 NACK,NACK 有两种用途:
a. 一般表示接收器未成功接收数据字节;
b. 当接收器是主控器时,它收到最后一个字节后,应发送一个 NACK 信号,以通知被控发送器结束数据发送,并释放总线,以便主控接收器发送一个停止信号 STOP。
起始信号是必需的,结束信号和应答信号,都可以不要。
模拟 I2C
目前大部分 MCU 都带有 I2C 总线接口,但是芯片自带的 I2C 也有两个问题,一个是移植性较差不够通用,另外部分 MCU 不带 I2C 还是得要模拟的方式,以及一些芯片设计的 I2C 据说是存在问题的,如: stm32 的 I2C 不够稳定,efm32 的 I2C 不够节能等等。这边建议,在权衡 I2C 占用的 CPU 资源是否可以承受后,再做选择。
IIC 选用 IO 模式
通过上面可以知道,IIC 在通信过程中,主设备SCL始终是保持发送状态,因此这边我们可以将 SCL 设置为推挽或者开漏输出。推挽的输出能力较强,开漏输出则需要加上拉电阻,而一般 IIC 的推荐电路就是需要人为增加了上拉电阻的,因此在考虑功耗等一些情况下,可能开漏输出更好。
而问题的关键是 SDA 到底设置为什么模式?
网上参考资料众说纷纭,这边以我自己做实验的亲身感受为例,我推荐在作为输出时将这个脚配置为开漏输出模式;在 MCU 需要接收信号的时候,如果 MCU 本身没有限制,或者不需要精简代码的话,则将其设置为输入模式。详解:
将 SDA 直接设置为开漏模式:
这种方法一般用于之前程序的很多单片机中,开漏因为需要接上拉电阻才能改变电平,且具有线与的特性,通过读 IO 口的状态,即便是设置成了开漏输出,但仍然可以读取IO的数据状态,可以说一劳永逸,一种模式两种用途,虽然目前试过大多数MCU通过这种方式也都可以读取,但毕竟是输出模式,万一以后的设计更改了,无法读取了,则有潜在性的问题。
将 SDA 设置位推挽输出模式进行输出,需要读取数据时转换成输入模式:
最近在不少地方看到用这种方式来对 IIC 器件进行读取,感觉较为灵活,之前也将开漏转换成了这种模式。但最近实验过程中发现了不少问题,在 SDA 发送数据结束后,等待应答的这个过程中,使用推挽模式,有明显的短路风险。这段时间虽然时间很短,且接下来会立即将推挽切换为输入模式,但在单步执行测试的过程中,实际会出现很高的电流,疑似推挽的高电平输出引起了断路,用这种模式必须较为谨慎,注意各种延时时间,千万不能让器件断路烧坏。在使用一个 IIC 通信的 AD 芯片过程中,一段时间后出现测量值不准,疑似可能是这种原因引起的。
SCL 使用开漏输出模式,SDA 使用开漏输出+输入模式:
通过上面的讨论,最终个人认为 IIC 通信过程中:SCL 使用开漏输出模式,SDA 使用开漏输出发送数据,使用输入模式读取数据,这种方法较为合理。值得注意:SDA 需要模式切换,IIC 的延迟时间无需过长,否则影响效率,这些根据手册中的标准执行。
以下以 EFM32 为例,给出参考代码,这边的代码只需要修改部分宏定义,就可以直接移植到 STM32 等其他单片机上。
|
|
自带 I2C
这边仅以 stm32 平台通过 I2C 总线读取 EEPROM 为例,说明下如何通过芯片自带 I2C 功能来通信。
|
|
小结
我们在根据芯片手册来写 I2C 驱动时,尤其需要注意以下几点:
- 传输数据的大小端模式,这边的大小端是位大小端而不是字节。
- 时钟周期,如果通讯出现问题,试着用示波器看 CLK 波形得出通讯速度,以及看下通讯设备能够支持的速度。
- 看下应答信号是否设置成功。
参考链接:
https://blog.csdn.net/luckywang1103/article/details/17549739
https://zhuanlan.zhihu.com/p/26579936
http://wenku.baidu.com/view/2a0a7f9869dc5022abea001d.html
http://blog.csdn.net/zmq5411/article/details/6085740
https://zh.wikipedia.org/wiki/I%C2%B2C
http://blog.sina.com.cn/s/blog_626998030102vfjx.html